事实上,不久以后,你就会希望这个控制器仅仅就是一个控制器。你之后会为其他的伺服电机控制和马达控制买另外的开发板。这些班会从微控制器上得到命令,然后你的机器人可以同时做很多事情。
当然,你可以做这个设备是一个很了不起的事情。
如果没有机器人外壳,做一个外壳
为了尽量简单的完成机器人的制作,我们只需要把所有部分黏合在一起,就可以完工了。
如果你愿意的话,你也可以把它弄得更漂亮。需要强调的是我们使用两个主轮,每个用一个马达驱动。控制它们前进机器人就会前进;控制一前一后,则会原地打转;如果一个动,一个不动,就好像向一边滑动的感觉。
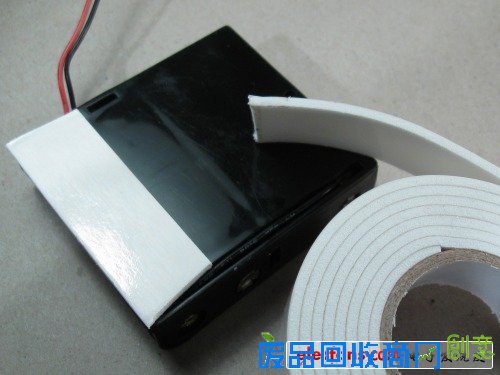
你需要做的事是把电池盒贴在马达上面,利用双面胶。如果电池装在里面,同时轮子足够大能够把它们放在车轴下面,这个东西的就可以自己保持平衡。