
当你把轮子装到马达上,把一根杜邦线切成两半,从线的末端去掉一些塑料,然后将其焊接到马达的接线头上。在另外一个马达上进行同样的操作。
确保没有任何焊锡或者导线碰到马达表面的金属。
一些轮子附带有可选择的橡胶轮胎,把它装上去也许是一个明智的选择,因为如果机器人被卡住了,可以滑动,这在测试和研发过程中是表现的非常好的、
板上芯片
你所拥有的Picaxe28X1微控制器和开发板,是令人惊叹和激动的小封装。
我仍旧记得我可以用这个微控制器来实现我能想象出的所有动作的时候的那股兴奋。我也希望你能在某种程度上得到这种感觉。坦白说,我们凭借各种各样的电子设备可以使这玩意去做任何事情。即使你对什么都不了解,哪怕电子对你来说就像你我之间那么陌生。
你可以用它去操控你的伺服,马达,运算器,监视距离等机器人需要的任何一个器件,这也是我们将要为之设置的东西。
这个微控制器是一个很长的芯片,你需要在上面编程,开发板上面有其输入和输出所需要的数据。
浏览一下以下这个页面
现在我不期望你能够马上去看这个页面,因为我承诺过让你能够更快的建造机器人、然而从某个角度看来,你读这个页面是非常重要的,了解这个开发板和微控制器。要记住回去看这个文章,为下一步做个书签。
说的够多了,把这个长芯片,也就是微控制器插进去。
确信是以正确的方式插入,在其中的一头有一个标志,在插槽上也有相应的标志,这两者必须统一。
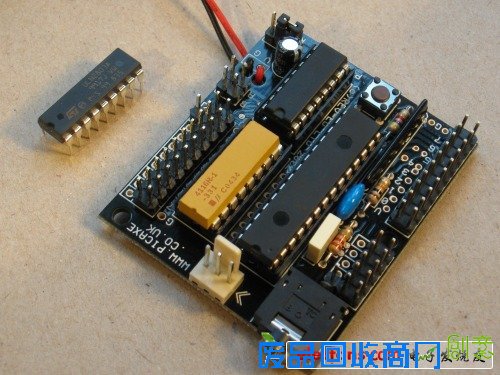
当你买这个开发板的时候,在本应插黄色芯片的那个位置,应该有插着一个黑色的芯片,如下图所示。
像我一样把黑色芯片拿掉,用黄色的代替它。它没有足够的针脚,按照图中确认那一头是不需要插的。
在图中,黄色芯片是位于微处理器和针脚最顶端的那一行之间。这一行会有输出(如果你读上面那篇开发板的介绍,你会明白的。上面的提到的书签,还记得么?)。
我们将要把伺服电机连接到任意一个器件上,这些伺服电机会反馈一些电气噪音回这导线上。这个黄色芯片是一个330欧姆的排阻,它可以减少传回到微控制器的噪音。这是一个简单的直接通过,在两者之间有些电阻,使信号的双路传输减弱,从而保护微控制器。
坦白说,我从没听人说因为伺服电机噪音而烧了微控制器,但因为手册告诉我们需要这样做,同时开发板也有相应的设计,所以我们就做足。
我也听说过这个芯片的黑色版本,其实这有点没趣的,只要有着相同的性能,什么颜色都是无关紧要的。
这颗黑色芯片,在其应用范围被称作达林顿复合晶体管驱动。如果你想了解更多信息,你可以阅读那个手册。就算你没有把伺服电机准确的安装在板上相对的位置,这会是一个非常好的芯片。它可以放大信号,你可以把扬声器接在他上面(即之前安置伺服电机的地方)。同是用“sound”这个命令,你会让它发出巨大的声响,演奏音乐等等。你最好去尝试一下这个。用这块开发板和微控制器的缺点是当你要用这个伺服电机的时候,你要吧达林顿管拿开,乐趣就此而来。但还有更多的待你去挖掘体验。
最后一个芯片是马达控制器,我们需要把它安装到相应的位置。
当你把微控制器安装在板上,它可以开关电源,你可以利用它去驱动马达、然而马达是未经过处理的,它会影响微控制器的输出。另一件需要关注的事是,如果微控制器只可以控制开关。那么怎么操作机器人后退呢?
一个马达控制器可以处理所有这些问题。
这个马达控制器可以驱动两个小马达(每个600毫安),也不会影响微控制器,最重要的是它能使马达后退,这在面向一堵墙时操作会更加便利。
板上面油专门安放一对小马达的地方,使他们驱动这个机器人的正反向运动。
开发板的东西已经组装起来了,微控制器的4,5,6,7路输出已经流入马达控制器。然后经过两根很好的导线流向马达A和B,你只需要将针脚焊接好,轻而易举的事情。
贴士:插入新芯片
那些未用过的新芯片的两组针脚间距一般都比较宽,在插入插槽之前,把针脚捏近。你去尝试去插一颗新芯片,你就会明白我说什么了。
贴士:拔出旧芯片
把一把平的螺丝刀放在芯片的下面,从下往上慢慢的撬,你会发现很容易就能把它拔出来。