
2.1-2.3都是跟合金板过不去的活儿,原作者的办法基本是土法上马,与美帝的高科技风格严重不符。柚子在大学折腾机器人那会儿去交大观摩,他们有加工中心,只要把CAD图画出来发过去,那边用等离子切割机就给“打印”出来了,钻啊、掏异形啊这种活儿根本不存在。更神奇的是切完的边不用磨,基本不扎手。另外我们用土法掏方形孔的时候是先钻大孔,把带锯拆开一头套进去然后慢慢锯,得到的孔要多丑有多丑,然后还得上铁砧拿小锤砸平
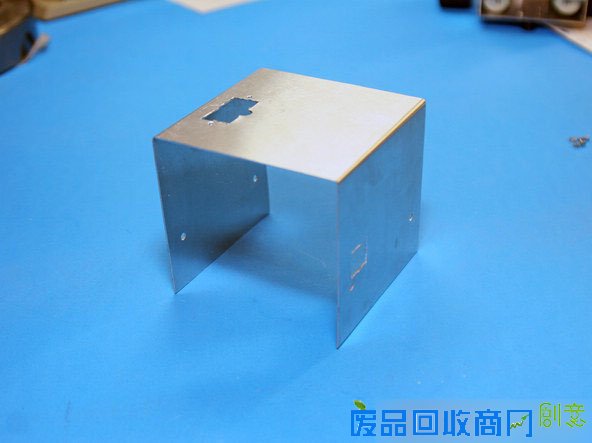
2.4 弯板

● 把底板的折弯图用双面胶贴到铝板的另一面,对准圆洞方洞的位置,别贴歪了
● 把铝片贴折弯图的一面向上塞进弯板机里,在所有标示折弯的部位折90度

● 每个长边上的两个突出部要先折,然后再折机身的边。(顺序反了就塞不进去了)
● 折弯后要缓慢释放,测量,确认每一处折弯都要是直角
2.5 制作顶板
● 重复2.1-2.4步骤,加工顶板(top),然后你就搞定了每个机器人都会喜欢的底盘
3 运动系统
3.1 安装电机
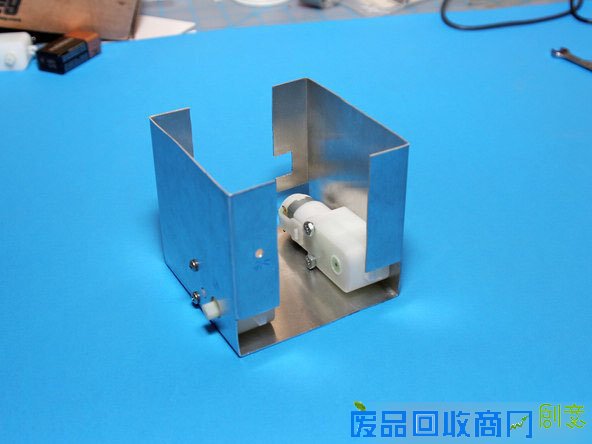
● 用4-40 x 1螺丝穿过小孔,将驱动电机定位在底板上,电机的传动轴应该穿过大孔
● 使用螺母和垫片在电机的一端上紧,因为可以施展的空间尺寸很小,可能需要尖嘴钳子(夹住螺母)才能上紧
3.2 制作轮毂

● 用2英寸(外径,合50.8mm)的空心钻头(见过装空调的师傅在墙上钻大洞用的那种钻吧,很类似)在废木头板上钻出轮子(钻透木板之后木板上有个圆洞,钻头中间的洞里会剩下个圆片,这个圆片就是轮子),我用了18号板(貌似是一种规格),最终得到的轮子有3/4英寸(19.05mm)厚,直径1.8英寸(45.72mm)。钻轮子的时候要牢固的固定木板,并且缓慢进刀,防止卡住钻头